17 тысяч подписчиков
125 видео
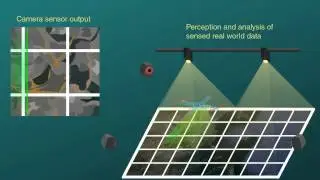
Planning Beyond the Sensing Horizon Using a Learned Context
MIT ACL - CC-RRT*
MIT ACL - Variable Pitch Quadrotor
Controlling Self Driving Cars
(ICRA) Robust MADER: Decentralized and Asynchronous Multiagent Traj Planner Robust to Comm Delay
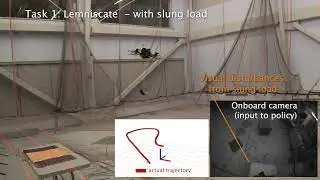
Efficient Deep Learning of Robust Policies from MPC via Imitation and Tube-Guided Data Augmentation
ICRA 2022 Workshop on Robotic Perception and Mapping: Emerging Techniques
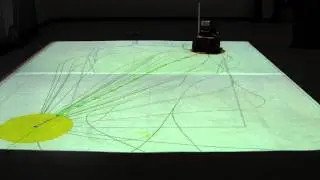
MAR-CPS: Measurable Augmented Reality for Prototyping Cyber-Physical Systems
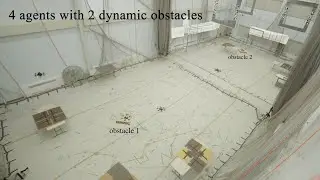
Aggressive 3-D Collision Avoidance for High-Speed Navigation
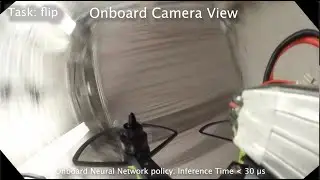
MIT ACL - Autonomous Quadrotor Flip
Semantic-level Decentralized Mult-Robot Decision-Making using Probabilistic Macro-Observations
PANTHER: Perception-Aware Trajectory Planner in Dynamic Environments
Tube-NeRF: Efficient Imitation Learning of Vision-based Policies from MPC
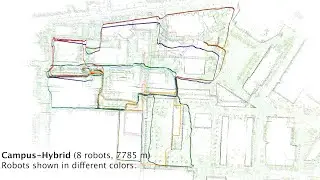
Resilient and Distributed Multi-Robot Visual SLAM: Datasets, Experiments, and Lessons Learned
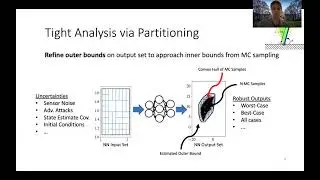
L-CSS/ACC 2021: Robustness Analysis of Neural Networks
EVORA: Deep Evidential Traversability Learning for Risk-Aware Off-Road Autonomy
ICRA 2021: CLIPPER: A Graph-Theoretic Framework for Robust Data Association
Robust MADER: Decentralized Multiagent Traj Planner Robust to Comm Delay in Dynamic Environments
ICRA 2021: Efficient Reachability Analysis of Closed-Loop Systems with Neural Network Controllers
RAMP: A Risk-Aware Mapping and Planning Pipeline for Fast Off-Road Ground Robot Navigation