(ICRA) Robust MADER: Decentralized and Asynchronous Multiagent Traj Planner Robust to Comm Delay
Accepted to the 2023 International Conference on Robotics and
Automation (ICRA).
New videos available: • Robust MADER: Decentralized Multiagen...
Preprint available on Arxiv: https://arxiv.org/pdf/2209.13667.pdf
Code: https://github.com/mit-acl/rmader
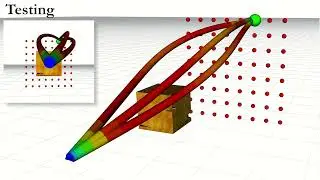
Abstract: Although communication delays can disrupt multiagent systems, most of the existing multiagent trajectory planners lack a strategy to address this issue. State-of-theart approaches typically assume perfect communication environments, which is hardly realistic in real-world experiments. This paper presents Robust MADER (RMADER), a decentralized and asynchronous multiagent trajectory planner that can handle communication delays among agents. By broadcasting both the newly optimized trajectory and the committed trajectory, and by performing a delay check step, RMADER is able to guarantee safety even under communication delay. RMADER was validated through extensive simulation and hardware flight experiments
and achieved a 100% success rate of collision-free trajectory
generation, outperforming state-of-the-art approaches.






![[ICRA24] PUMA: Decentr. Uncertainty-aware Multiagent Traj. Planner w/ Image Segmentation Frame Align](https://images.videosashka.com/watch/W73p42XRcaQ)
![[Presentation] Deep-PANTHER: Learning-Based Perception-Aware Traj. Planner in Dynamic Environments](https://images.videosashka.com/watch/zlMxuSSvo3o)