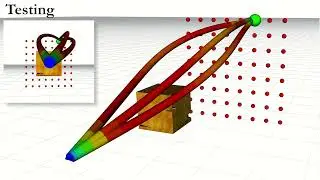
(TRO 2023) Energy-Aware, Collision-Free Information Gathering for Heterogeneous Robot Teams
Hardware experiment video for "Energy-Aware, Collision-Free Information Gathering for Heterogeneous Robot Teams", accepted to Transactions on Robotics in 2023. (IEEE Xplore: https://ieeexplore.ieee.org/document/...) (Arxiv: https://arxiv.org/abs/2208.00262)
Abstract:
This article considers the problem of safely coordinating a team of sensor-equipped robots to reduce uncertainty about a dynamical process, where the objective tradeoffs information gain and energy cost. Optimizing this tradeoff is desirable, but leads to a nonmonotone objective function in the set of robot trajectories. Therefore, common multirobot planners based on coordinate descent lose their performance guarantees. Furthermore, methods that handle nonmonotonicity lose their performance guarantees when subject to interrobot collision avoidance constraints. As it is desirable to retain both the performance guarantee and safety guarantee , this work proposes a hierarchical approach with a distributed planner that uses local search with a worst-case performance guarantees and a decentralized controller based on control barrier functions that ensures safety and encourages timely arrival at sensing locations. Via extensive simulations, hardware-in-the-loop tests, and hardware experiments, we demonstrate that the proposed approach achieves a better tradeoff between sensing and energy cost than coordinate-descent-based algorithms.



![2021 Oscar Nominee Predictions [EPISODE 30]](https://images.videosashka.com/watch/OsZ1VQddIFw)


![[FLASHING LIGHTS] Dead Air OST - Plumber comatose](https://images.videosashka.com/watch/WvfcDWbM2E4)

![[ICRA24] PUMA: Decentr. Uncertainty-aware Multiagent Traj. Planner w/ Image Segmentation Frame Align](https://images.videosashka.com/watch/W73p42XRcaQ)
![[Presentation] Deep-PANTHER: Learning-Based Perception-Aware Traj. Planner in Dynamic Environments](https://images.videosashka.com/watch/zlMxuSSvo3o)