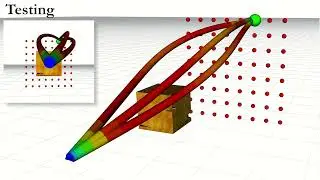
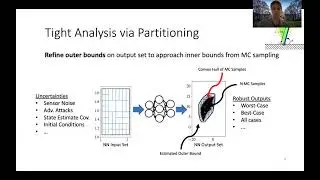
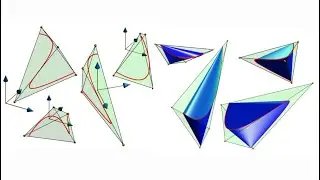
ICRA 2021: Efficient Reachability Analysis of Closed-Loop Systems with Neural Network Controllers
ICRA 2021
Paper: https://arxiv.org/abs/2101.01815
Code: https://github.com/mit-acl/nn_robustn...
ICRA 2021
Paper: https://arxiv.org/abs/2101.01815
Code: https://github.com/mit-acl/nn_robustn...







![[ICRA24] PUMA: Decentr. Uncertainty-aware Multiagent Traj. Planner w/ Image Segmentation Frame Align](https://images.videosashka.com/watch/W73p42XRcaQ)
![[Presentation] Deep-PANTHER: Learning-Based Perception-Aware Traj. Planner in Dynamic Environments](https://images.videosashka.com/watch/zlMxuSSvo3o)