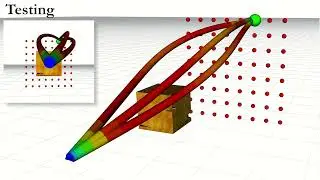
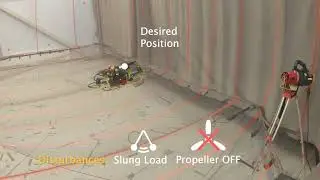
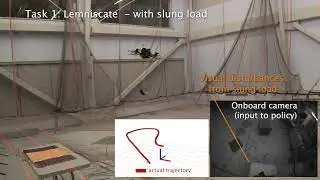
MAR-CPS: Measurable Augmented Reality for Prototyping Cyber-Physical Systems
For more information, refer to www.mit.edu/~shayegan/files/infotech2015.pdf
Work by Shayegan Omidshafiei, Ali-akbar Agha-mohammadi, Yu Fan Chen, N. Kemal Ure, Jonathan P. How, John Vian, Rajeev Surati
Video and animations: Shayegan Omidshafiei
This work is supported by Boeing Research & Technology.



![2021 Oscar Nominee Predictions [EPISODE 30]](https://images.videosashka.com/watch/OsZ1VQddIFw)


![[FLASHING LIGHTS] Dead Air OST - Plumber comatose](https://images.videosashka.com/watch/WvfcDWbM2E4)

![[ICRA24] PUMA: Decentr. Uncertainty-aware Multiagent Traj. Planner w/ Image Segmentation Frame Align](https://images.videosashka.com/watch/W73p42XRcaQ)
![[Presentation] Deep-PANTHER: Learning-Based Perception-Aware Traj. Planner in Dynamic Environments](https://images.videosashka.com/watch/zlMxuSSvo3o)