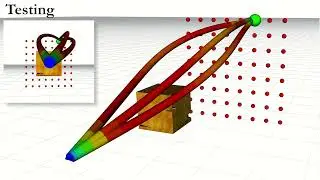
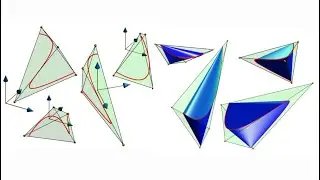
Aggressive 3-D Collision Avoidance for High-Speed Navigation
In this video we discuss the development and experimental verification of a collision avoidance algorithm, the Triple Integrator Planner (TIP), that is nearly an order of magnitude faster than the state-of-the-art and can operate at a level of agility near the physical limits of the vehicle. The key property of TIP is its ability to generate collision-free, dynamically feasible paths within 5ms (worst case) of receiving a point cloud. The short computation time is achieved by 1) planning with instantaneous perception data, 2) using the closed-form solution to a minimum-time optimal control problem to generate motion primitives online, and 3) intelligently sampling motion primitives for collisions. Hardware experiments demonstrate the utility of the algorithm. ICRA '17 video submission.







![[ICRA24] PUMA: Decentr. Uncertainty-aware Multiagent Traj. Planner w/ Image Segmentation Frame Align](https://images.videosashka.com/watch/W73p42XRcaQ)
![[Presentation] Deep-PANTHER: Learning-Based Perception-Aware Traj. Planner in Dynamic Environments](https://images.videosashka.com/watch/zlMxuSSvo3o)