MIT ACL - CC-RRT* with projector visualization For more information visit: acl.mit.edu
Wie gut ist die AXA wirklich? BU-Versicherung im Test
TOPA - Hipo Hipopótamo (Official Video)
FFCSS 2020🏆LUXURY KILLS❤️(1/16); (1/8) Luxury Kills vs Hw Rus🔥Luxury Kils vs Skifi Tut😱Free Fire
РЕМОНТ КВАРТИР В БРОВАРАХ +380675046248 ЖК ЛЕСНОЙ КВАРТАЛ
Wie viel sollte ich bezahlen? (BU-Versicherung)
“PUS*L NI MISTER” PARODY SONG | LADYGINE
PES 2021 - NEW KITPACK V31 SEASON 2023 - 2024 || ALL PATCH COMPATIBLE || SIDER & CPK VERSION
Who is THE MAN FROM THE WINDOW?! (Cartoon Animation)
Efficient Deep Learning of Robust Policies from MPC via Imitation and Tube-Guided Data Augmentation
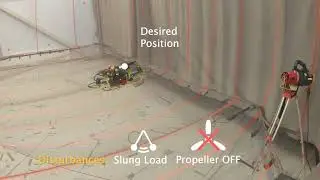
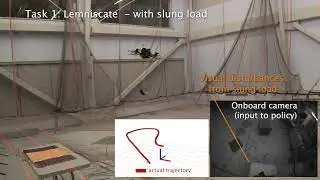
Experimental Results for "Efficient Learning of Adaptive Policies via Tube-Guided Data Augmentation"
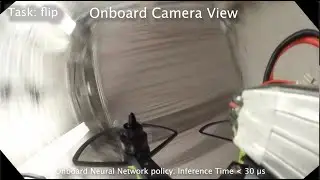
Tube-NeRF: Efficient Imitation Learning of Vision-based Policies from MPC
EVORA: Deep Evidential Traversability Learning for Risk-Aware Off-Road Autonomy
[ICRA24] PUMA: Decentr. Uncertainty-aware Multiagent Traj. Planner w/ Image Segmentation Frame Align
[Presentation] Deep-PANTHER: Learning-Based Perception-Aware Traj. Planner in Dynamic Environments
RAMP: A Risk-Aware Mapping and Planning Pipeline for Fast Off-Road Ground Robot Navigation
(TRO 2023) Energy-Aware, Collision-Free Information Gathering for Heterogeneous Robot Teams
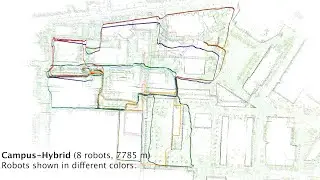
Resilient and Distributed Multi-Robot Visual SLAM: Datasets, Experiments, and Lessons Learned
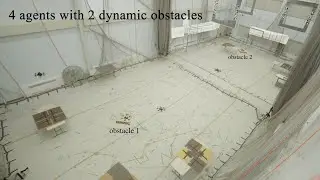
Robust MADER: Decentralized Multiagent Traj Planner Robust to Comm Delay in Dynamic Environments
Probabilistic Traversability Model for Risk-Aware Motion Planning in Off-Road Environments
(ICRA) Robust MADER: Decentralized and Asynchronous Multiagent Traj Planner Robust to Comm Delay
Robust Trajectory Tracking on Insect-Scale Soft-Actuated Aerial Robots with Deep-Learned Tube MPC
Deep-PANTHER: Learning-Based Perception-Aware Trajectory Planner in Dynamic Environments
ICRA 2022 Workshop on Robotic Perception and Mapping: Emerging Techniques
PhD Thesis Defense: Jesus Tordesillas
T-RO/IROS 2021 Presentation: Distributed Certifiably Correct Pose-Graph Optimization
Demonstration-Efficient Guided Policy Search via Imitation of Robust Tube MPC
ICRA 2021: CLIPPER: A Graph-Theoretic Framework for Robust Data Association
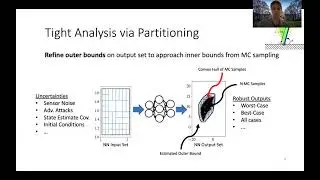
ICRA 2021: Efficient Reachability Analysis of Closed-Loop Systems with Neural Network Controllers
L-CSS/ACC 2021: Robustness Analysis of Neural Networks
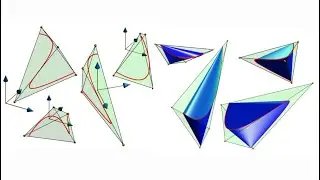
MINVO Basis: Finding Simplexes with Minimum Volume Enclosing Polynomial Curves
PANTHER: Perception-Aware Trajectory Planner in Dynamic Environments
LION: Lidar-Inertial Observability-Aware Navigator for Vision-Denied Environments







![[ICRA24] PUMA: Decentr. Uncertainty-aware Multiagent Traj. Planner w/ Image Segmentation Frame Align](https://images.videosashka.com/watch/W73p42XRcaQ)
![[Presentation] Deep-PANTHER: Learning-Based Perception-Aware Traj. Planner in Dynamic Environments](https://images.videosashka.com/watch/zlMxuSSvo3o)