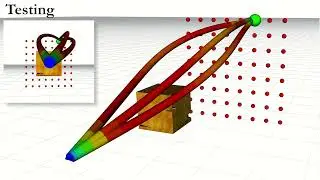
Planning Beyond the Sensing Horizon Using a Learned Context
IROS '19 Best Paper on Cognitive Robotics
Paper: https://arxiv.org/abs/1908.09171
Code: https://github.com/mit-acl/dc2g
The video shows two sample trajectories of a robot moving from the road to a house front door in an Unreal simulation environment in a suburban neighborhood. The robot has only been trained from a static dataset of real aerial views of houses.








![[ICRA24] PUMA: Decentr. Uncertainty-aware Multiagent Traj. Planner w/ Image Segmentation Frame Align](https://images.videosashka.com/watch/W73p42XRcaQ)
![[Presentation] Deep-PANTHER: Learning-Based Perception-Aware Traj. Planner in Dynamic Environments](https://images.videosashka.com/watch/zlMxuSSvo3o)