UAV (5) Tight pattern flight with TSD navigation screen, autopilot using IMU
AerialRobotics EasyUAV Scenario 5 'dog bone' dense waypointing mission
The video shows mission planning, pattern definition relative to takeoff point
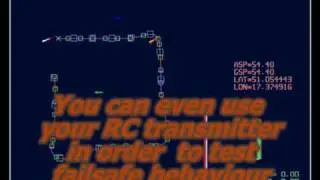
and the real-time display of amateur autopilot flying a low altitude mission at 50AGL.
As display telemetry, a video overlay system RVOSD is being used. The autopilot has dedicated output for the RVOSD and the display management is fully automatic: the autopilot uses one of its 'Trigger Engines' to define when the output should switch to navi mode.
The landing is automatic, but interrupted by manual RC transmitter control as the plane passes too close to a tree
(normally it is not a good idea to set landing to takeoff position and takoff from under a tree,
you should define remote 'fixed home position' which I forgot to do this time).
The flying pattern is very tight ('diamonds' are 200m high by 200m wide, 141m edge length) and the weather is not perfectly calm.
A pair of the diamonds creates 'dogbone' pattern, not very useful for photography but entertaining and difficult for the autopilot.
All waypoints have been set to 50m AGL, the return-home altitude 75m (not reached as home position was hit very fast),
automatic landing set to takeoff position, track follower enabled.
The autopilot obeys turning direction from the waypoints and tries to minimise error distance to the line connecting the waypoints.
The display engine (RVOSD) is a separate product, the user also has to set-up his own video transmitter and the camera.
Other payloads are also possible, typically up to 300g.
[email protected] for details
www.aerialrobotics.eu/flexipilot/flexipilot-osd-en.pdf
www.aerialrobotics.eu/flexipilot/flexipilot-navigation-en.pdf