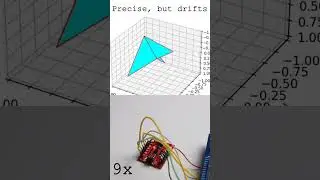
Kalman Filter: check how well it works
This video shows the result of using the Kalman Filter for attitude estimation. It removes drifts resulting from a gyroscope and noise coming from the accelerometer/compass. The source code can be found on my community page:
https://www.patreon.com/user?u=80399744
Website:
https://www.steppeschool.com