NfoLD Webinar May 2021 - Featuring Dr. Morgan Cable and Kalind Carpenter
Title: The Exobiology Extant Life Surveyor (EELS)
Abstract:
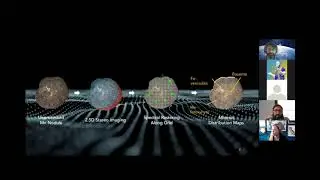
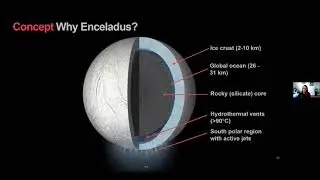
Plumbing the depths of the Enceladus, and possibly Europa, plume vents for liquid water, searching for extant life. Descending crevasses in ice sheets on Earth to discover the fate of melt water runoff and its effects for Earth science. The Exobiology Extant Life Surveyor (EELS) robotic architecture is designed to carry the latest instruments into these dynamic arenas in search of biosignatures. It is adaptable to traverse ocean world-inspired terrain, fluidized media, enclosed labyrinthian environments and liquids. It is a snake-like, self-propelled endoscope form comprising serially-replicated segments with encapsulated locomotion and bending. Multiple segments sequentially reverse rotations to reduce torsion in the endoscope, or replicate rotations to perform holonomic movements for steering. We will produce first-of-its-kind compliant Archimedes screw propulsion units that act as wheels, tracks, gripping mechanisms, and propelling units under water working as propellers. With EELS we may finally address the civilization-level science question in our own cosmic backyard: Are we alone?
About Dr. Morgan Cable:
Morgan L. Cable is the supervisor of the Astrobiology and Ocean Worlds Group at JPL. Her research focuses on organic and biomarker detection strategies, through both in situ and remote sensing techniques. She also serves as the Ocean Worlds Program Scientist for the Planetary Science Mission Formulation Office, and is a Co-I on Dragonfly and a Collaborator on the Mapping Imaging Spectrometer for Europa (MISE) instrument of Europa Clipper. Morgan has performed field work in extreme environments that serve as analogs for other worlds, such as the Atacama Desert in Chile, the lava fields of Iceland, and the summit of Mt. Kilimanjaro.
About Kalind Carpenter:
Kalind Carpenter is a Robotics Engineer in the Robotic Vehicles and Manipulators group (347B). The lab he works in focuses on rapid technology development and end effectors specifically tailored to gripping and mobility. Current work includes Principal Investigator of the Exobiology Extant Life Surveyor (EELS), an adaptable mobility capability aimed to traverse through the plume vent crevasses on Enceladus to reach the ocean below the ice.