Gesture control Robot | Project Created by Nilutpol Kashyap
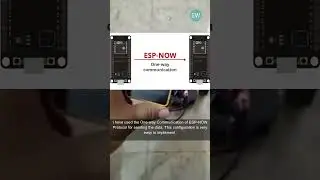
It is a gesture-controlled robot which is controlled by sending commands from an M5Stack ESP32 board and another ESP32 receives the command for motor control.
I have used the One-way Communication of ESP-NOW Protocol for sending the data. This configuration is very easy to implement and it is great to send data from one board to the other like sensor readings or ON and OFF commands to control GPIOs.
Project Created by : Nilutpol Kashyap
Follow Electronic Wings for more such videos.