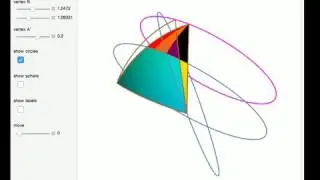
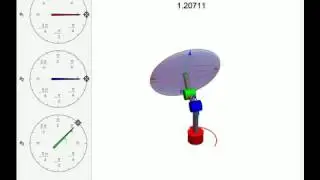
Manipulability Ellipsoid of a Robot Arm
http://demonstrations.wolfram.com/Man...
The Wolfram Demonstrations Project contains thousands of free interactive visualizations, with new entries added daily.
Manipulability of a robot is the capacity to change the end effector's position as a function of the joint configuration [1]. A larger manipulability measure indicates a greater range of possible motions at that configuration. The manipulability measure...
Contributed by: Aaron T. Becker and Mary Burbage
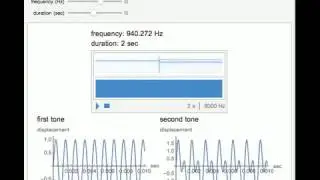
Audio created with WolframTones:
http://tones.wolfram.com