294 тысяч подписчиков
66 видео
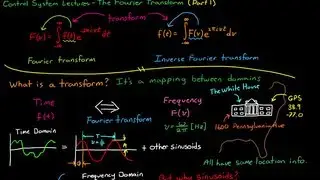
Introduction to the Fourier Transform (Part 1)
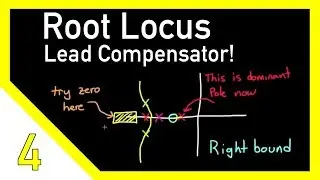
Designing a Lead Compensator with Root Locus
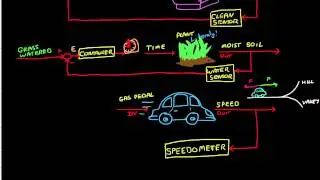
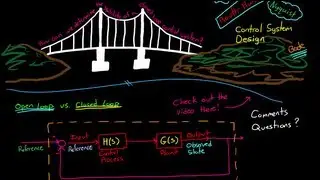
Control Systems Lectures - Closed Loop Control
Where have I been?
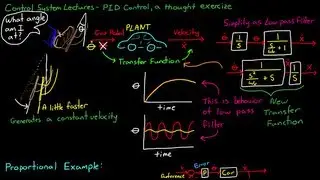
Simple Examples of PID Control
The Laplace Transform - A Graphical Approach
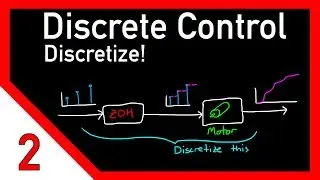
Discrete control #2: Discretize! Going from continuous to discrete domain
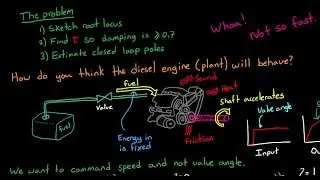
Standard HW Problem #1: PID and Root Locus
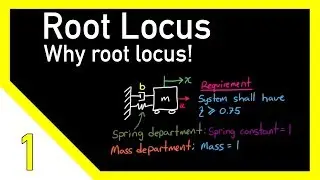
The Root Locus Method - Introduction
Nyquist Stability Criterion, Part 1
Stability of Closed Loop Control Systems
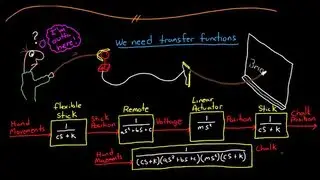
Control Systems Lectures - Transfer Functions
Introduction to System Stability and Control
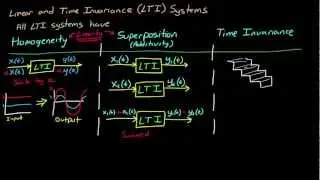
Control Systems Lectures - LTI Systems
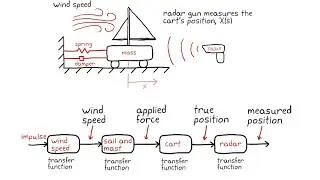
Robotic Car, Closed Loop Control Example
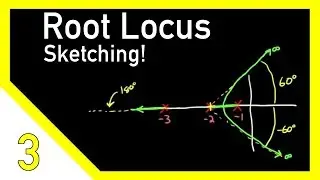
Sketching Root Locus Part 2
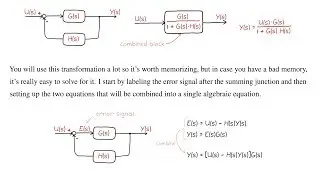
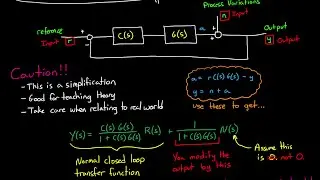
Simplifying and modifying block diagrams
Understanding The Sensitivity Function
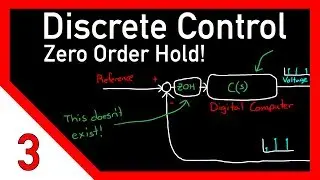
Discrete control #3: Designing for the zero-order hold
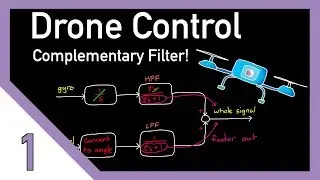
Drone Control and the Complementary Filter
Discrete control #4: Discretize with the matched method
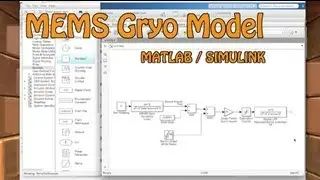
A simple MEMS gyro model using MATLAB / Simulink
Humans, Robots, and Non-Prehensile Manipulation
PID Control - A brief introduction
Discrete control #1: Introduction and overview
The convolution theorem and polynomial multiplication
Discrete control #5: The bilinear transform
Gain and Phase Margins Explained!
A quick announcement and request for feedback
Control Systems Lectures - Time and Frequency Domain
Control System Lectures - Bode Plots, Introduction
Introduction to the Fourier Transform (Part 2)
Sketching Root Locus Part 1
Transfer Functions: Putting it all together
System Identification Methods
Designing a Lag Compensator with Root Locus
What are Lead Lag Compensators? An Introduction.
Robotic Car - How to read Gyro Datasheets (Part 2)
Designing a Lead Compensator with Bode Plot
Nyquist Stability Criterion, Part 2
CORRECTION: Bode Plots by Hand: Complex Poles or Zeros
Robotic Car - How to read Gyro Datasheets (Part 1)
Designing a Lag Compensator with Bode Plot
Modeling Physical Systems, An Overview
Robotic Car - A Simple Way to Build a Model
Gain a better understanding of Root Locus Plots using Matlab
Controlling Robotic Swarms
Discrete control #6: z-plane warping and the bilinear transform
The Fundamentals of Control Theory
Standard HW Problem #2: Which is the real open loop transfer function?